今度は、ソリューションがカメラの動きに正確に一致しているかどうかを判断する必要があります。ソリューションが正確な場合、ソリューションのロケータは実際のフィルム セットから取得したポイントと同じように配置されます。たとえば、フェンスに沿ったポイントはプレーンに沿ってアラインされているはずです。また、Maya のカメラは実際のカメラの動きと同じようにロケータの周囲を移動します。
Overall Pixel Slip は、ソリューションの精度を大まかに示したものです。Overall は、全フレームのすべてのポイントの平均であることを意味します。Pixel slip は、ソルバが実行されたカメラから見て各 3D ロケータがバックグラウンドのトラック ポイントにどれだけ正確に一致しているかを計測したものです。たとえば、flower1 と flower1_3D が全フレーム で 1 ピクセルずつ離れて表示される場合、ピクセルのずれは 1.0 です。ピクセルのずれが小さいほど、ソリューションの精度は高くなります。
Overall Pixel Slip は 2 未満が理想的です。ただし、ずれが 2 未満であっても、ソリューションがライブ アクション シーンのカメラの動きとそっくり同じになるというわけではありません。カメラの動きは、次の手順で確認します。
Overall Pixel Slip に「poor」または 2 より大きい数値が表示される場合、トラック ポイントの問題点を解決する必要があります。Track コントロール パネルをもう一度表示し、 ソルバの準備を行うで説明した手順を繰り返します。
それでも 2 以下のソリューションに達しない場合は、あらかじめ用意されているシーンを使用してレッスンを続けることをお勧めします。 ファイル > シーンを開く(File > Open Scene)を選択して MayaLiveLessonData/scenes ディレクトリに移動し、 goodPoints.ma をダブル クリックします。問題が発生しないよう細心を払って作成された同じトラック ポイントを含むシーンが読み込まれます。goodPoints シーンで Solve をクリックすると、Overall Pixel Slip には 1.0 前後の数値が表示されます。
カメラが予想どおりに移動しているかどうか評価する必要があります。カメラはセットの上方から開始して下方に移動するため、同じようにロケータの上方から下方に移動する必要があります。次の図のフレームを比較してください。
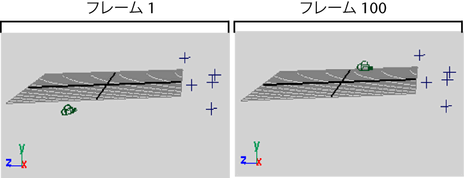
この場合、カメラはロケータの下方から開始して、下方ではなく上方に移動しています。また、一連の急激に変化する動きも発生しています。このソリューションは正しくありません。
Locator Summary パネルは、各ポイントのピクセルのずれを時間の経過に沿ってグラフィック表示したものです。Overall Pixel Slip はすでに確認しましたが、Locator Summary パネルを使えば、どのポイントでピクセルのずれが最も大きいか、およびそれがどのフレームで発生しているかを見つけることができます。
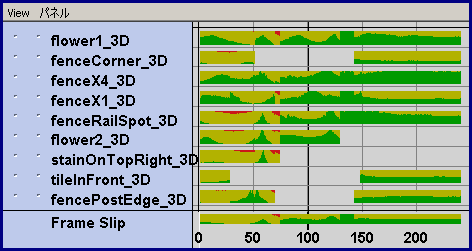
グラフに赤色と黄色の領域が非常に多いポイントがあれば、このポイントが問題のソリューションの原因であると確定できます。この場合、多くのポイントに赤色と黄色の領域がありますが、これらの領域は主に最初の 100 フレームに見られます。
赤色と黄色の領域がすべて最初の 100 フレームで発生していることから、これらのフレームについてソルバに十分な情報がないと判断できます。情報を改善するには、これらのフレームに 1 つまたは複数のトラック ポイントを追加する必要があります。
ポイントの数は、この問題を解決するのに重要ではありません。むしろ、正しいポイントを選択することのほうがソルバの実行に役立ちます。以下の手順では、別のポイント セットをシーンに読み込みます。これらのポイントは、どのタイプのポイントを選択すればよいかを示しています。





