ソリューションを簡単に改善するために、別のトラック ポイントのセットが用意されているので、そのトラック ポイントをインポートします。
ソルバを実行している間に、次の図を見て今読み込んだポイントを確認し、ソリューションを改善するためになぜこれらのポイントが選択されたのかを考えてみてください。
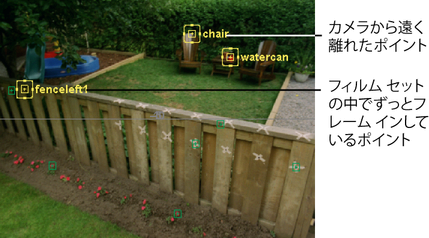
一般的に、ソルバの実行を容易にするには、カメラから遠く離れたポイントと近くのポイントなど、さまざまな位置のポイントを使用することが重要です。
Overall Pixel Slip がこれより大きくなる場合は、ソルバを再度実行したときに initial1 が選択されていたことが原因の可能性があります。solution_rf を選択し、もう一度 Solve をクリックしてみてください。Solve をクリックするときに選択されていたソリューションが、ソルバの結果に影響を与えることがあります。
このソリューションではカメラとロケータがグリッドの下にあるので、グリッドの下方から眺めると最も見やすくなります。カメラおよびロケータとパース ビュー グリッドとの位置関係は無視してください。
ロケータの配置とカメラの動きだけに注目してください。ショットに表示されるポイントの配置およびカメラのモーションに近くなるはずです。たとえば、フェンスに沿ったポイントは、ショット内と同じようにプレーンに沿ってアラインされます。
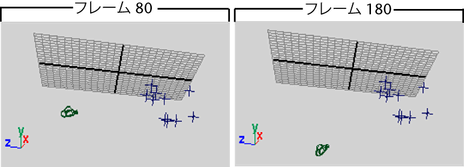
フレーム 80 とフレーム 180 を比較すると、今度はカメラがロケータと相対的に下方に移動していることが分かります。これが、このショットで期待されるカメラの動きです。
この時点では、マッチムービングが完了していて、正確であるとみなすことができます。ただし、これをはっきりと確かめるには、カメラの前に配置されたモデルを使用してアニメーションを再生する必要があります。バックグラウンドに対してモデルがずれて見えないようであれば、マッチムービングは正確です。このタイプのテストについて学習するには、次のレッスンを続けてください。





