ソルバは、Maya カメラをアニメートするライブ化によって実行されます。ソルバを初めて実行して、正確なソリューションが得られることは稀です。いったんソルバが実行されると、正確なソリューションが作成されるまで、ソリューションを評価し、トラック データを改善する必要があります。
Solve コントロール パネルの上に表示されるビュー パネルは、トラックで使用したものとは異なります。新しいパネルについては、レッスンを進めながら学習していきます。
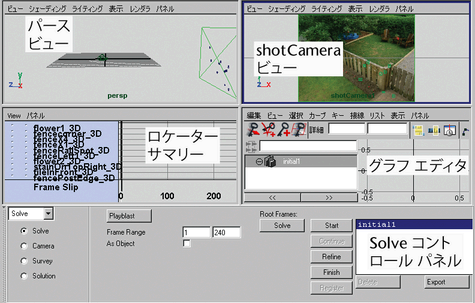
Solve ボタンの横にボタンの列(Start から Register までのボタン)があります。これらのボタンは、Solve ボタンをクリックしたときに実行されるのと同じ手順を段階的に実行します。段階的にソルバを実行するのは高度な用法です。ここではこれらのボタンは無視していただいて構いません。
ソルバの実行が終了すると、Solve コントロール パネルのソリューション リストに solution_rf という名前のソリューションが表示されます。ソルバは数回実行するので、ソルバを実行するごとにリストが保存されます。
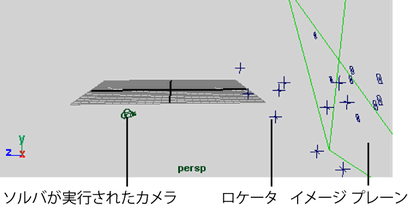
ソリューションは、アニメートされたカメラと、パース ビューに十字線として表示されるロケータで構成されます。ロケータはワールド空間内のマークで、モデリング時にリファレンス ポイントとして使用することができます。各ロケータは 1 つのトラック ポイントと対応していて、トラック ポイントの名前に「_3D」を追加した名前が付けられています(fenceCorner_3D など)。
次の図は、ソリューションの例を示します(各構成要素の名前を示してあります)。パース ビューはワイヤフレーム モードで表示されるので、パース ビューのイメージ プレーン上にはイメージが表示されないことに注意してください。