補助ピボットを使用して、FBIK エフェクタに追加のピボット ポイントを作成することができます。補助ピボットにより、FBIK エフェクタを 3D 空間の別のポイントからトランスフォームして、歩行サイクル中の足の回転、煙草をもみ消す足のつま先の付け根、空を飛行中に真っ逆さまに回転しながら落ちる胴体などの特殊な動きを作成することができます。
足の FBIK エフェクタに補助ピボットが作成されます。補助ピボットの名前は接尾辞が Pivot であること以外は、親エフェクタと同じです。また、後続のエフェクタにはそれぞれ番号が付けられます。たとえば、LeftFootEff の最初の補助ピボットの名前は LeftFootEffPivot で、2 番目の補助ピボットの名前は LeftFootEffPivot1 となります。
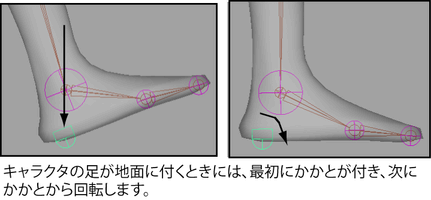
二足歩行のキャラクタの歩行サイクルをアニメートする場合に、補助ピボットを使って足のローリング動作を上手に作成するには、LeftFootEff および RightFootEff エフェクタに 2 つの補助エフェクタ(かかとの補助ピボットとつま先の付け根の補助ピボット)を作成する必要があります。

LeftFootEff は LeftFootEffPivot(かかと)の位置から回転し、かかとが地面を蹴って足首から足が回転する動きを生成します。
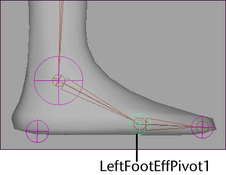
これで LeftFootEff は LeftFootEffPivot1(つま先の付け根)の位置でも回転するようになり、足がつま先の付け根の位置で曲がり、地面を蹴る動きが生成されます。






