





インバース キネマティクスを使用してポーズを付けてアニメートする
次に IK ハンドルを作成し、あとで腕と脚のポーズを設定する際に使用します。次の手順では、IK ハンドルを作成する前に必要な最初のセットアップについて説明します。
IK ハンドルを作成する前にキャラクタをセットアップするには
スケルトン全体でカレント ジョイントの角度が優先回転角として設定されます。この手順はスケルトン完成後に役立ちます。これ以降、Maya では、インバース キネマティクス(IK)でポーズを設定中、膝と肘の現在の曲がりがこれらのジョイントの優先初期回転方向として使用されます。これによって簡単に、人間のキャラクタの自然なモーションのポーズをキャラクタに設定できます。
脚の IK ハンドルを作成、ポーズ設定、およびアニメートするには
 を選択します。
を選択します。
これで、left_hip から left_ankle までのジョイントをすべて制御できる IK ハンドルが作成されます。ハンドルのメインのマニピュレータは left_ankle にあります。
IK ハンドルは、作成後に選択されたオブジェクトです。誤ってハンドルの選択を解除した場合には、left_ankle(IK ハンドル ツールを使用したあとにクリックした最後のジョイント)をクリックすれば再度これを選択できます。ハンドルを選択するときには必ず、ハンドルと一緒にジョイントやその他のオブジェクトを選択していないことを確認します。選択内容を確認するには、アウトライナ(Outliner)をチェックします。
ハンドル マニピュレータをどれほど離れた位置にドラッグしても、脚のジョイントは脚をまっすぐにしたときの位置より先には伸長されません。この機能は望ましい機能です。スケルトンにポーズを付ける際には、そのサイズは変わらないようにしておきたいものだからです。ただし、脚のジョイントをドラッグすると、そのジョイントの上の階層にあるボーンは伸びます。このため、IK ハンドルを移動する前に、ハンドルと一緒にジョイントを選択していないことを確認することが重要になります。
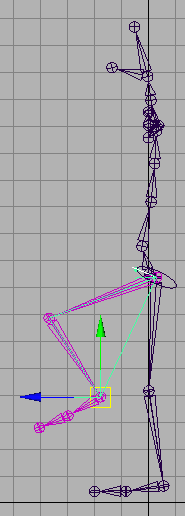
ハンドルをある位置にドラッグするときに、脚のジョイントが突然フリップする(ひっくり返る)ことがあります(配置例として、次の図を参照)。このように、この領域で脚の位置を制御するのは難しいことです。
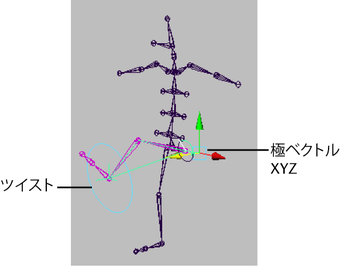
デフォルトの IK ハンドル(IK 回転プレーン ハンドル)にあるマニピュレータを使って、ジョイントがフリップしないようにすることができます。ハンドルを選択した状態で、 修正 > トランスフォーム ツール > 移動ツール(Modify > Transformation Tools > Move Tool)、回転ツール(Rotate Tool)、スケール ツール(Scale Tool)、マニピュレータの表示ツール(Show Manipulator Tool)を選択します。極ベクトル XYZ マニピュレータをわずかに別の方向に移動します(次の図を参照)。
それでもフリップする場合は、ツイスト マニピュレータを回転して脚を回転させます。極ベクトル XYZ とツイスト アトリビュートにキーを設定して値を指定し、キャラクタが移動するときにフリップしないようにすることができます。
ジョイントのフリップを避けるさらに確実な方法として、極ベクトル コンストレインも利用できますが、何らかの初期設定が必要です。詳細については、Maya ヘルプを参照してください。
腕の IK ハンドルを作成、ポーズ設定、およびアニメートするには