このセクションでは、ソリューションの改善策についての概要を記載します。一般的な問題に関して、頻度の高いものから順に対策を説明します。
最初に改善を試みる対象はトラック ポイントです。まず、トラック ポイントにずれや障害がないか確認し、あればその領域を再度トラックします。次に、シーケンスの中でトラック ポイントが不足している領域を確認して、トラック ポイントを追加します。
不都合なトラック データは、トラック データが少なすぎる場合と同じくらい問題を引き起こす可能性があります。トラック ポイントが曖昧なフレーム、カメラの視野の外に出るフレームをすべて削除します(Edit > Delete Region)。
コンストレインを適用すると、ソルバに追加情報を与えることができます。追加するコンストレインは、調査またはカメラのいずれかのタイプです。
調査コンストレインは、特にトラック ポイントのデータが少ないエリアで、トラック ポイントの相互位置関係を定義付けるのに有効ですたとえば、ショットの一部の領域に 3 つのトラック ポイントしか設定していないような場合でも、それらが同一平面上にある場合は、プレーン コンストレインを追加することができます。詳細については、 調査コンストレインを選択するを参照してください。
カメラ コンストレインはカメラの焦点距離(Focal Length)、移動(Translation)、および回転(Rotation)を制御します。なかでも良く使用されるのが焦点距離コンストレインです。 焦点距離コンストレインを作成するを参照してください。移動コンストレインは、三脚にカメラを設置して撮ったショットに有効です。回転コンストレインは、3 つの軸を一度にコンストレインする場合に使用されるだけで、あまり頻繁には使用されません。カメラの移動と回転を改善するには、調査コンストレインを使用するほうが一般的です。詳細については、 カメラの移動コンストレインと回転コンストレインを作成するを参照してください。
Locator Summary パネルには、ロック ポイント と呼ばれる別のタイプのコンストレイントも表示されます。ロック ポイントは機能的にポイント コンストレインと同じで、作成が容易という特徴があります。これは主に 3D ロケータをジオメトリのポイントにスナップするときに使用します。詳細については、 調査コンストレインを選択するを参照してください。
Locator Summary パネルではまた、ポイントをカメラから無限遠点にあるものと設定することができます。ソルバはこのインフィニット ポイントを、もっぱらカメラ位置の計算に使用します。この機能は特にズーム ショットで有用です。詳細については、 調査コンストレインを選択するを参照してください。
複数の調査コンストレインを追加した場合、コンストレイン同士がコンフリクトしていないか確認してください。Live は複数のコンストレインのウェイト値を同時に考慮し、コンフリクトする場合は中間値を採ります。たとえば、ポイント コンストレインが原点(0,0,0)に設定されていて、プレーン コンストレインが X=2 に設定されている場合、ソルバは原点(0,0,0)とプレーンの中間値(X=1)を選択します。このような問題を発見した場合は、コンフリクトしているコンストレインを見つけてください。
ソルバが選択するルート フレームのデフォルト数は、特にショット内のトラック ポイントが瞬時にフレーム アウトする場合など、ショットによっては十分でない場合があります。そのような場合は、Number of Root Frames パラメータを大きめ(一般に 10 または 15)に変更してください。
一般的に、ソルバは良好で代表的なフレームを選択しますが、別のルート フレームを選択することもできます。ルート フレームの追加と削除はSolve Solution コントロール パネルで行います。次回にソルバを実行すると、ソルバが選択したフレームではなく、ユーザが選択したルート フレームのリストが使用されます。

カメラの動きが把握しやすいフレームを選択し、トラックが不良なフレームは選択しないようにしてください。たとえば、カメラが 10 フレームの間で最初はゆっくり動き、次にスピードを上げるような場合、スピードが上がる部分にルート フレームを追加します。ただし、カメラの動きが急激にパンしたり移動する場合は、トラックが不良になる場合があるため、このようなフレームは避けた方が良いでしょう。
Finish ステップでは、トラック ポイントがフレーム イン/アウトするフレームの前後でカメラのモーションカーブをスムージングすることができます。Solve コントロール パネルの Smoothing Interval 設定値を調整すると、スムージングの程度を制御することができます。
場合によっては、スムースが十分でないことが考えられます。カメラの動きが良好でない部分が確認された場合は、Smoothing Interval フィールドの値を 2 倍または 3 倍にして、Finish ステップを再実行してみてください。ただし、スムースの程度を上げる程、3D ロケータとトラック ポイント間でピクセルのずれが多くなります。
スムースは、トラック ポイントがフレーム イン/アウトするフレームのカメラの動きにのみ適用されます。トラック ポイントがフレーム イン/アウトするということは、トラック ポイントが計算対象に含まれたり対象外になったりするということなので、カメラのモーション カーブが急に変化します。スムースは、トラック ポイントがフレーム イン/アウトする前後のフレームでカメラのモーション カーブを調整することによって、こうした影響を相殺します。Smoothing Interval フィールドに入力する値は、フレーム イン/アウトの前後、何フレーム分にスムースを適用するかです。
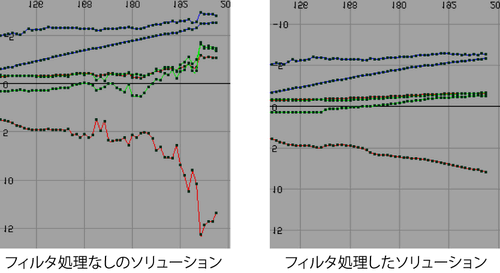
カメラの動きのソリューションに含まれる好ましくないジッタを修正するため、ソルバは Finish ステップ中にフィルタ処理を実行します。フィルタ処理の度合は、Solve コントロール パネルの Filter Level コントロールで制御できます。
ジッタが起きるのは、ソルバの方程式の解に矛盾が含まれたり、解が不定となるようなフレームの前後においてです。ルート フレームのソルバ処理には、こうした矛盾を増幅し、カメラの動きにジッタを生じる傾向があります。フィルタ処理は、矛盾をはらんだフレームを探し出し、そのカメラのモーション カーブに強力なフィルタをかけます。
フィルタ効果を上げたい場合や、逆にフィルタ効果が強すぎてソリューションの精度に支障が出た場合は、Filter Level を調整します。上限は 10 前後です。0 に設定すると、フィルタ処理は行われません。
Root Frame ソルバの Start ステップで不正な guess ソリューションが生成された場合は、カメラをおおよその開始位置に配置しなおすと、ソルバ結果が改善される可能性が高くなります。また、カメラを最初と最後のフレームに配置してみてください。カメラの位置は正確である必要はなく、予想される大まかな位置に配置してください。
この方法は、Start ステップを実行する前に Survey コンストレインを作成した場合、コンストレインがソルバの guess ソリューションの生成に干渉する可能性があるため、特に有効です。また、このような場合は、Refine ステップを実行するまで、コンストレインを非アクティブまたは Registration only に設定してみてください。
Fine-Tune コントロール パネルのツールを使用して、カメラの位置を微調整してみてください。微調整はフレームごとに行います。ただし、トラック ポイントの精度をまず最初に確認してください。多くの場合、カメラのずれやぶれを解決することができます。
三脚にカメラを固定してパンするときは、shotCamera の Rotate Order アトリビュートを ZXY に変更すると、結果が改善されます。Rotate Order アトリビュートは、アトリビュート エディタ(Attribute Editor)の shotCamera ノードのトランスフォーム アトリビュートで確認できます。





