一般的に、ソルバははじめに大まかなソリューションを作成し、改善を繰り返してその精度を上げていきます。
ソリューションの成功度を判定するため、ソルバはトラック ポイントとそのロケータ間のピクセルのずれを計算します。全フレームのピクセルのずれの平均値が Overall Pixel Slip フィールドに表示されます。
任意の 1 フレームのピクセルのずれを調べるときは、Frame Pixel Slip フィールドを見ます。特定のフレームに問題があると思われる場合は、この数値が役に立ちます。
ロケータの位置は、相互に、またカメラの動きに対して、正しいシェイプになければなりません。スケールとワールド座標グリッドに対する方向は必ずしも重要ではありません。スケールとグリッドへのソリューションのレジスタは、後で調査コンストレインを使用して行うことができます。
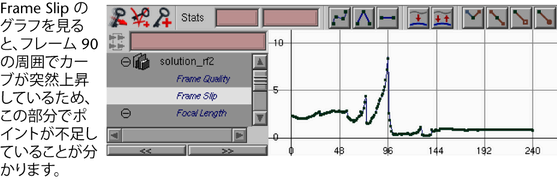
カーブが不自然で異常に変化していないか、値の範囲が急激に変化していないか確認してください。

ルート フレームのみをチェックします。他のフレームはマッチしない可能性があります(ただし、Solve と Finish によって生成されたソリューションはすべてのフレームに適用されます)。

希望に近いソリューションが得られたら、ずれたり、ジッタが発生していないか確認します。次のステップを実行してください。また、必要であれば、大まかなソリューションの評価と同じステップを繰り返してください。
インポートするには、 ファイル > インポート(File > Import)を選択します。オブジェクトを作成する場合は、シェルフにあるプリミティブ ジオメトリ ツールを使用します。





