





ソフト/リジッド ボディ > ソフト ボディの作成(Soft/Rigid Bodies > Create Soft Body)
ソフト/リジッド ボディ > ソフト ボディの作成(Soft/Rigid Bodies > Create Soft Body) 
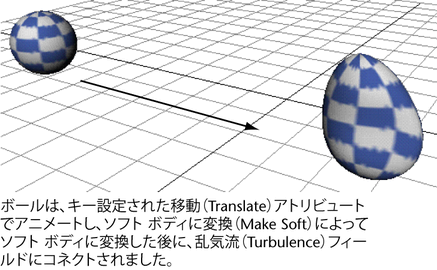
オブジェクトをソフト ボディに変換します。オブジェクトをまだアニメートしてはいないが、後でダイナミクス(たとえばフィールド)を使用してアニメートする場合は、このオプションを選択します。また、オブジェクトに対して非ダイナミック アニメーションを使用していて、ソフト ボディを作成した後もこのアニメーションを維持したい場合も、このオプションを使用します。非ダイナミック アニメーションには、キー、モーション パス、非パーティクル エクスプレッション、およびデフォーマがあります。
ソフト ボディのパーティクルに作用するダイナミクスは、非ダイナミック アニメーションの運動の影響を受けません。ダイナミクスは、オブジェクト上の他のアニメーションによるインフルエンスを受けないパーティクル オブジェクトのローカル空間内で発生します。
オブジェクトのコピーをソフト ボディにします(元のオブジェクトは変更されません)。このオプションを使用した場合、後述する非ソフト ボディをゴールにする(Make Non-Soft a Goal)をオンに設定して、元のオブジェクトをソフト ボディのゴールオブジェクトにすることができます。ソフト ボディはアニメートされたゴール オブジェクトに追従します。ソフト ボディのパーティクルのゴール ウェイトを編集して、弾性のあるモーションや揺れるモーションを作成することができます。
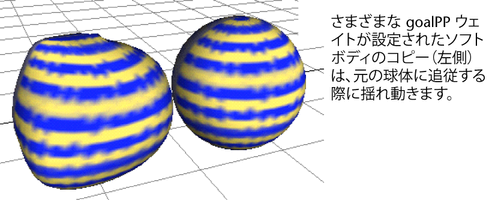
たとえば、複製し、コピーをソフト ボディにするを選択し、非ソフト ボディをゴールにするをオンに設定して球体をソフト ボディにしたとします。次に、元の球体であるゴール オブジェクトのモーションをアニメートするキーを設定します。最後に、ソフト ボディのコピーのパーティクルにさまざまな goalPP 値を設定したとします。アニメーションを再生すると、ソフト ボディのコピーは、元の球体に追従する際に、ゼラチンが揺れるように変形します。ただし通常は、非ソフト オブジェクトの非表示をオンに設定して元の球体を隠すようにします。
ゴールおよびゴール ウェイトの詳細については、 ゴールを参照してください。
もう 1 つの手法として、非ソフト ボディをゴールにするをオフに設定した状態で、複製し、コピーをソフト ボディにするを繰り返し使用する手法があります。これにより、全く同じオブジェクトのソフト ボディのコピーを複数作成することができます。この場合、元のオブジェクトとは独立して、それぞれのコピーをアニメートすることができます。
このオプションは、複製し、コピーをソフト ボディにすると同様の機能がありますが、元のオブジェクトをコピーして、そのオリジナルのオブジェクトをソフト ボディにします。
オブジェクト下流のコンストラクション ヒストリで、コピーではなく元のオブジェクトをソフト ボディとして使用することが必要な場合に複製し、オリジナルをソフト ボディにするを使用します。
たとえば、IK スプラインを使用するには、コピーではなく元のカーブを使用してジョイント チェーンを制御しなければなりません。この場合は、複製し、オリジナルをソフト ボディにするを使用して IK スプラインをソフト ボディにします。非ソフト ボディをゴールにするをオンに設定した場合は、カーブのコピー(ゴール)をアニメートして、ソフト ボディの IK スプラインのモーションを制御することができます。
元のジオメトリ、またはそのコピーから作成されたゴール オブジェクトをソフト ボディが追いかけるようにするには、このオプションをオンに設定します。ソフト ボディのウェイト ペイント ツール(Paint Soft Body Weights Tool)を使用すると、ソフト ボディのサーフェスにペイントすることで、パーティクルごとにソフト ボディにゴール ウェイトを設定することができます( ソフト ボディのウェイト ペイント ツール(Paint Soft Body Weights Tool)を参照)。
ソフト ボディを作成した後にソフト ボディのパーティクルのゴール ウェイトを編集する場合は、 ゴール アトリビュートを編集するを参照してください。ゴール ウェイトを 0 に設定すると、ソフト ボディは自由に曲がったり変形します。この値を 1 に設定すると、ソフト ボディは固くなります。これは、ゴール オブジェクトの輪郭を正確に追従します。
非ソフト ボディをゴールにするをオフに設定した状態でソフト ボディを作成した場合も、パーティクルのゴールを作成することができます。これを行うには、まずソフト ボディのパーティクルを選択します。次に、ゴールとなるオブジェクトを Shift キーを押しながら選択し、 パーティクル > ゴール(Particles > Goal)を選択します。
元のジオメトリまたはそのコピーから作成されたゴール オブジェクトにソフト ボディがどの程度追従するかを設定します。この値を 0 に設定すると、ソフト ボディは自由に曲がったり変形します。この値を 1 に設定すると、ソフト ボディは固くなります。0 から 1 の間の値に設定すると、ソフト ボディは中間的な固さになります。
自分自身と衝突するソフト ボディを含め、ソフト ボディ同士のコリジョンは予期しない結果になることがあります。衝突後にソフト ボディが互いの方向に移動する場合は、特に予期しない結果が生まれやすくなります。