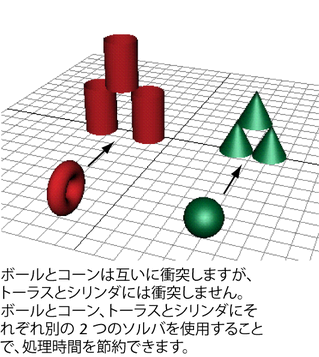
衝突するオブジェクトの集合体に対してそれぞれ 1 つずつ、複数のソルバを作成することができます。互いに衝突するオブジェクトにのみ同じソルバを使用することで、各リジッド ボディ ソルバが不必要なオブジェクトの存在を追跡するのを避けることができ、さらには処理時間も短縮することができます。
シーン内で最初のリジッド ボディを作成すると、特に別のソルバを作成しない限り、そのリジッド ボディおよびそれ以降に作成されるすべてのリジッド ボディを制御するリジッド ボディ ソルバが作成されます。別のソルバを作成した場合、そのソルバはそれ以降作成されるリジッド ボディを制御します。それぞれのソルバには、それが制御するリジッド ボディに作用する個別のアトリビュートがあります。フィールドは、ソルバに関係なく、任意のリジッド ボディにコネクトすることができます。
ソルバには rigidSolver1 などのデフォルト名がつきます。この名前は、ソルバ > カレントのリジッド ボディ ソルバ(Solvers > Current Rigid Solver) > rigidSolver# を選択したときに表示されるリストの一番下に現れます。
リジッド ボディは、前のステップで選択したソルバによって制御されます。たとえば rigidSolver3 を選択してから球体をアクティブ リジッド ボディにした場合、その球体は rigidSolver3 によって制御されます。
rigidBody -edit -solver solverName





